Navigation:
Leg Structure
Modular Neural Control for Omni Directional Locomotion
Performance of the Walking Machine
Description of the Walking Machine
- Mechanics
- Electronics
- Programming
Publications |
Descriptions:
| Biologically inspired eight-legged walking machine AMOS-WD08 |
 |
|
Copyright Fraunhofer IAIS & Institute of Cognitive Science, University of Osnabrueck
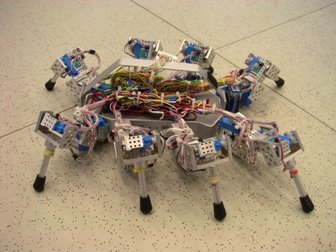
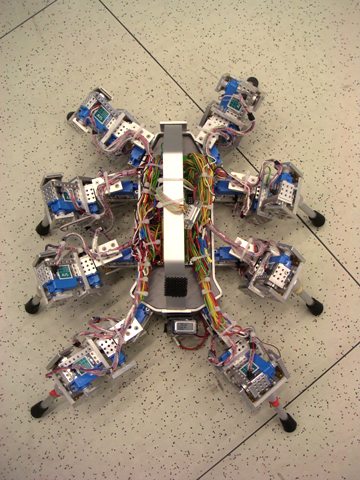
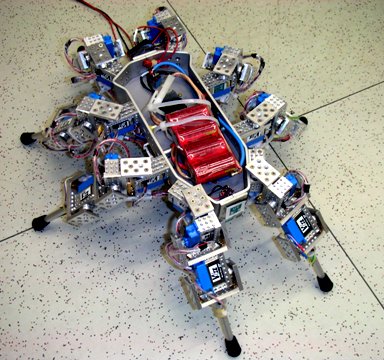
The AMOS-WD08 (Advanced Mobility Sensor Driven-Walking Device) is an 8-legged walking machine. It consists of eight identical legs, each with three joints (3 DOF). They are built from a construction kit. The chassis of the AMOS-WD08 is designed following a scorpion body contour but the tail part is ignored. It is constructed from only one part where all legs are orientedly attached. All leg joints are driven by microdigital servomotors. The size of the walking machine is 25 cm wide, 35 cm long, 10 cm high. The weight of the fully equipped robot (including 24 servomotors, all electronic components, sensors, and a mobile processor) is approximately 2.7 kg. Each of the AMOS-WD08 joints has a potentiometer sensor for detecting the actual angle position. In addition, it has a photoresistor sensor in each foot tip for measuring the ground contact.This walking machine is driven by modular neural control to perform omnidirectional walking. It can serve as a hardware platform for experiments concerning the function of a neural perception-action system.
![]() |
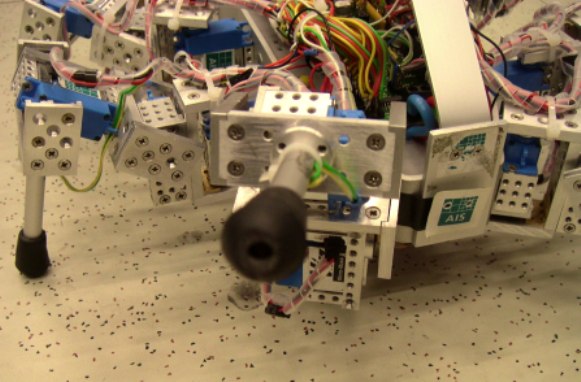
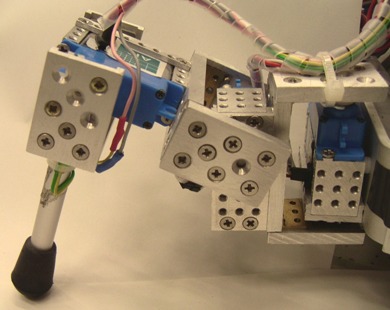
Leg Structure
Each leg has three joints (three DOF): the thoraco-coxal (TC-) joint enables forward (+) and backward (-) movements, the coxa-trochanteral (CTr-) joint enables elevation (+) and depression (-) of the leg, and the femur-tibia (FTi-) joint enables extension (+) and flexion (-) of the tibia The morphology of this multi-jointed leg is modeled on the basis of a typical insect leg but the tarsus segments are ignored. This high mobility of the legs enables the walking machine to walk in omnidirection and to perform a reflex behavior, e.g., standing in an upside-down position.
  reflex action reflex action
Modular Neural Control for Omni Directional Locomotion
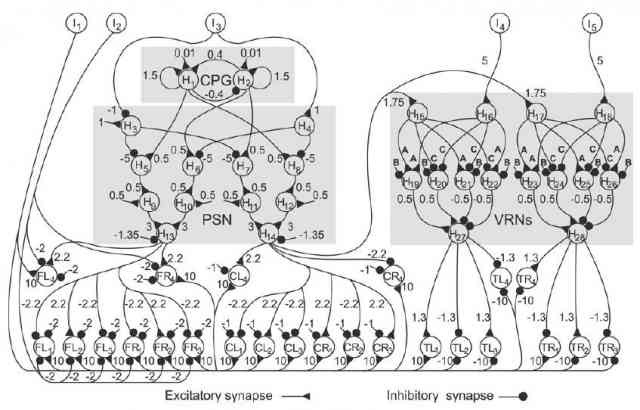
The modular neural controller of the walking machine was modeled with an artificial neural network using discrete-time dynamics. Part of it was developed by realizing dynamical properties of recurrent neural networks. The controller based on a CPG generates omnidirectional walking and drives the reflex behavior. (read [1] for more details).
Performance of the Walking Machine
 Video clip 1 Video clip 1
|
|
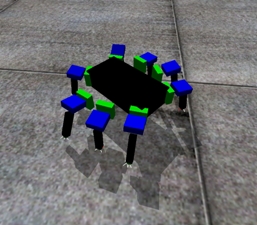
Omnidirectional walking behavior of the simulated 6- and 8-legged walking machines in the physical simulator (YARS provided by Frank Pasemann and Keyan Mahmoud Ghazi-Zahedi of Fraunhofer AIS) (the implemented controller is described in [1]) .
|
|
 Video clip 2 Video clip 2
|
|
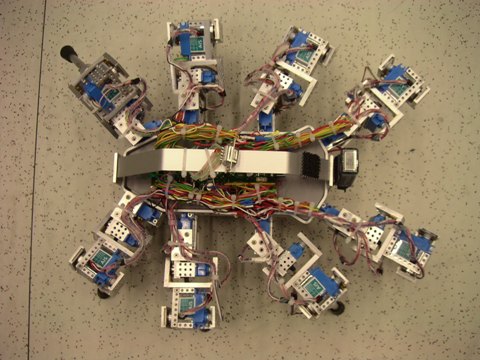
Omnidirectional walking behavior of the physical 6- and 8-legged walking machines in a real environment (the implemented controller is described in [1]). |
Description of the Walking Machine
• Dimension without the tail (L x B x H): 40 x 30 x 12 cm
• Weight 2.7 Kg
• Structure of Polyvinyl Chloride (PVC) and Aluminum alloys AL5083184
• 8 Legs with 3 degrees of freedom of each leg
• Driven by 24 micro (20 Ncm) servomotors.
• MBoard which is able to control up to 32 servomotors synchronously.At the same time 32 (+4 optional) analog input channels can be sampled and read with an update rate of up to 50 cycles per second. The board has an RS232 interface, which serves as the standard communication interface. The size of the board is 125 mm. x 42 mm.
• PDA having an Intel (R) PXA255 processor for programming neural preprocessing and control. It communicates with the MBoard via an RS232 interface.
• Battery of 6v NiMH 3600mAh for the servomotors
• Battery of 9v NiMH for the MBoard
• C programming on the MBoard for controlling servomotors and for reading digitized sensor data
• C/ C++ programming of the neural controller [1] created in Embedded Visual C++ for implementing on a PDA.
Publications
[1] Manoonpong, P.; Pasemann, F.; Woergoetter, F. (2008) Sensor-Driven Neural Control for Omnidirectional Locomotion and Versatile Reactive Behaviors of Walking Machines. Robotics and AutonomousSystems,doi:10.1016/j.robot.2007.07.004,Elsevier Science, Vol 56(3), pp 265-288 .(pdf)
Top of Page
|
|