The AMOS-WD06 (Advanced Mobility Sensor Driven-Walking Device) is the 6-legged walking robot which mimics the structures of walking animals, i.e. cockoach. This robot is controlled by neural control and learning mechanisms which allow it to autonomously perform a broad behavioral repertoire including foothold searching, elevator reflex (swinging a leg over obstacles), selfprotective reflex (standing in an upside-down position), obstacle avoidance, auditory- and wind-evoked escape responses, phototaxis (turn towards a light source), climbing over obstacles, and five different gaits. Furthermore it can learn to adapt its walking pattern to new situations. This robot can serve as a hardware platform for experiments concerningthe function of a neural perception-action system. Its neural controller can be applied to prosthetic and orthotic devices to generate more effective walking.
Biomechatronics
Legs
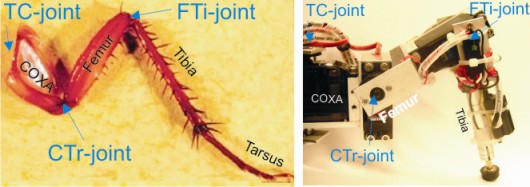
Each leg has three joints (three DOF): the thoraco-coxal (TC-) joint enables forward (+) and backward (-) movements, the coxa-trochanteral (CTr-) joint enables elevation (+) and depression (-) of the leg, and the femur-tibia (FTi-) joint enables extension (+) and flexion (-) of the tibia The morphology of this multi-jointed leg is modeled on the basis of a cockroach leg but the tarsus segments are ignored. Each tibia part contains a spring damped compliant element to absorb an impact force as well as to measure the ground contact event during the walk. This high mobility of the legs enables the walking machine to walk in omnidirection and to perform a reflex behavior, e.g., standing in an upside-down position.
Note that the figure of a cockroach leg is from Zill S, Schmitz J, B�schges
A (2004) Load sensing and control of posture and locomotion, Arthropod Struct.
Dev. 33, 273�286.
Body
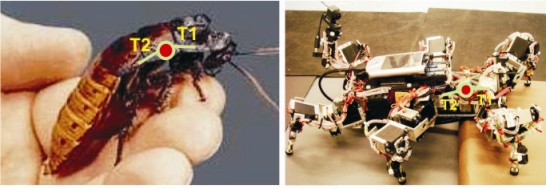
Inspired by invertebrate morphology of the American cockroach�s trunk and its motion, a backbone joint which can rotate in a horizontal axis was constructed. It imitates a connection between the first (T1) and second (T2) thoracic of a cockroach. Thus, it will provide enough mobility for the machine to climb over an obstacle to lift the front legs up to reach the top of an obstacle and then bend them downward during step climbing.
Note that the figure of a cockroach is from
http://www.angelfire.com/in/ghcfaq/
Tail
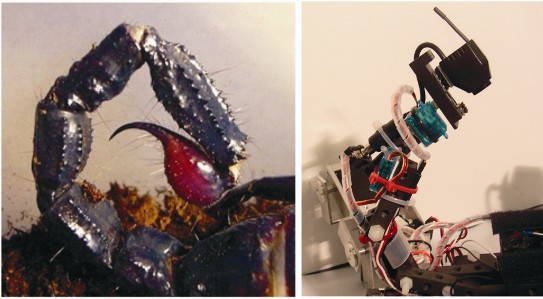
Tail with two DOF rotating in the horizontal (y-axis) and vertical (z -axis) axes was implemented on the back of the trunk. In fact, this actively moveable tail, which can be manually controlled, is used only to install a mini wireless camera for monitoring the environment while the machine is walking. However, the tail also gives the walking machine a more animal-like appearance, e.g., in analogy to a scorpion�s tail with its sting.
Note that the figure of a
scorpion�s tail with a sting is modified from S.R. Petersen 2005 (http://www.bugweb.dk/).
Sensors
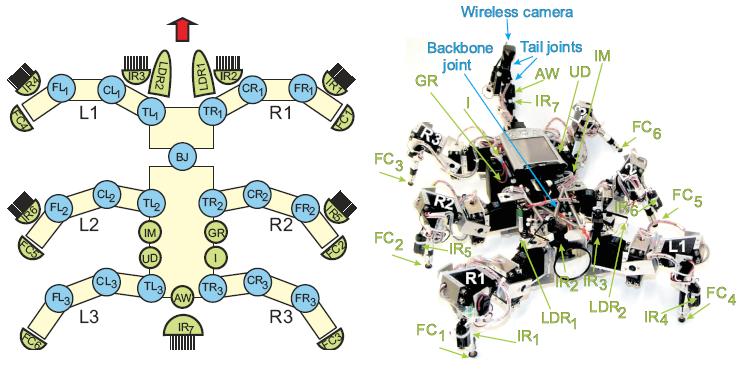
The AMOS-WD06 has a multitude of sensors: six foot contact sensors (FC), six reflexive optical sensors, seven infra-red sensors (IR), two light dependent resistor sensors (LDR), one upside-down detector sensor (UD), one gyro sensor (GR), one inclinometer sensor (IM), one auditory-wind detector sensor (AW), and one current sensor (I). All these sensors are used to generate a broad behavioral repertoire including foothold searching, elevator reflex (swinging a leg over obstacles), selfprotective reflex (standing in an upside-down position), obstacle avoidance, auditory- and wind-evoked escape responses, phototaxis (turn towards a light source), climbing over obstacles, five different gaits, and adaptation (learning capabilities).
Sensor-driven neural control for omni directional walking and versatile reactive behaviors
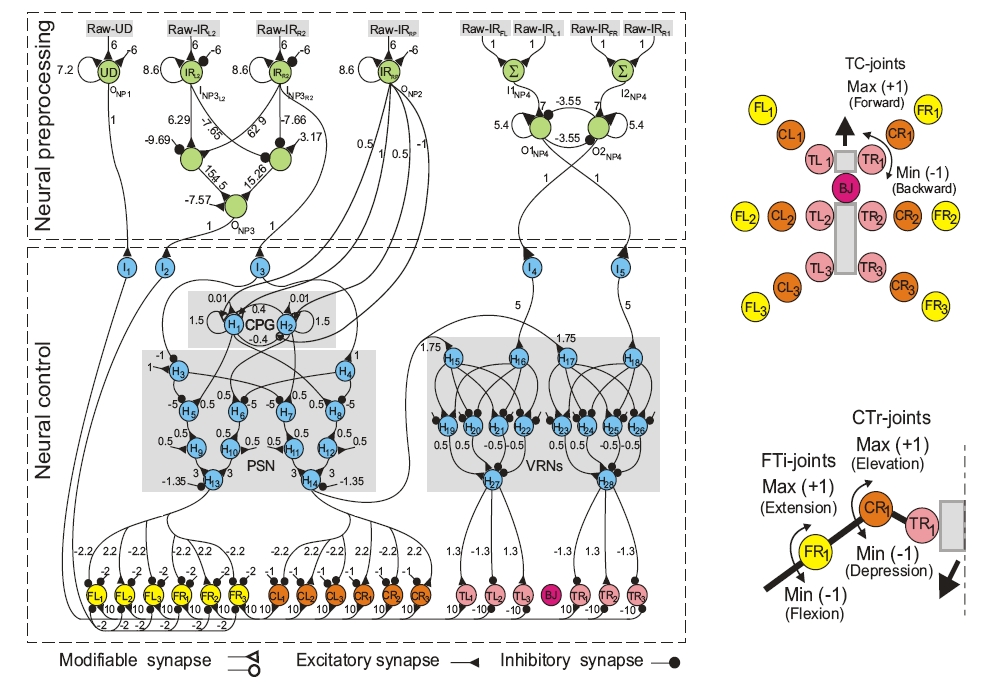
The sensor-driven neural controller of the walking machines was modeled with an artificial neural network using discrete-time dynamics. Part of it was developed by realizing dynamical properties of recurrent neural networks. The controller was designed as a modular structure composed of two main modules: the modular neural control and the neural sensory preprocessing networks. The modular neural control, based on a CPG, generates omnidirectional walking and drives the reflex behavior while the neural preprocessing networks filter sensory noise as well as shape the sensory data for activating an appropriate reactive behavior, e.g., a self-protective reflex, escape behavior, and obstacle avoidance behavior. The presented neuromodules are small so that their structure-function relationship can be analysed. The complete controller is general in the sense that it can be easily adapted to different types of even-legged walking machines without changing its internal structure and parameters (read [1,2] for more details).
(For more details of the AMOS-WD06 and its controller, read the papers)
Neural chaos control and learning for insect-like gait generation and adaptive Behaviors
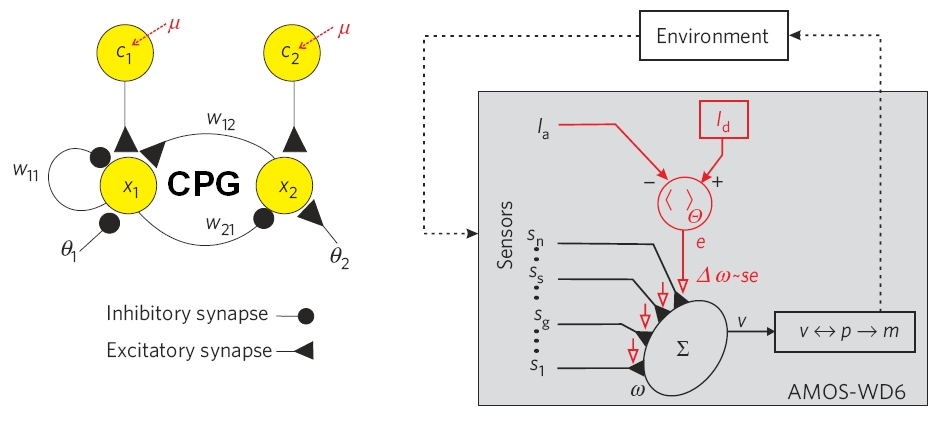
Here we show that applying a simple but inherently chaotic pattern-generator into the control system of the AMOS-WD06 enables it to exhibit 11 basic behavioural patterns (for example, orienting, taxis, self-protection and various gaits) and their combinations allowing it to successfully navigate through a complex environment. Moreover, using this controller the robot can not only react to environmental stimuli but also learn to find its behaviourally useful motor responses for different situations. Thus, such neural control provides a powerful yet simple way to self-organize versatile behaviours in autonomous agents with many degrees of freedom (see [12] for more details).
Chaotic pattern generator Neural learning circuit
Description of the Walking Machine
Mechanics
Dimension without the tail (L x B x H): 40 x 30 x 12 cm
Weight: 4.2 Kg
Structure of Polyvinyl Chloride (PVC) and Aluminum alloys AL5083184
6 Legs with 3 degrees of freedom of each leg
Active tail rotating in horizontal and vertical axis
Driven by eighteen analog (100 Ncm), one digital (220 Ncm) and two micro (20 Ncm) servomotors
Backbone joint rotating in a horizontal axis
Electronics
Multi-Servo IO-Board (MBoard)1 developed at Fraunhofer Institute in Sankt Augustin. It is able to control up to 32 servomotors synchronously. At the same time 32 (+4 optional) analog input channels can be sampled and read with an update rate of up to 50 cycles per second.The board has an RS232 interface, which serves as the standard communication interface
Personal Digital Assistant (PDA) having an Intel (R) PXA255 processor for programming neural preprocessing and control. It communicates with the MBoard via an RS232 interface
Battery of 4.8v NiMH 2100mAh for the servomotors
Battery of 4.8v NiMH 2100mAh for the support circuitry of the auditory sensors
Battery of 9v NiMH for the MBoard
Battery of 9v NiMH for the wireless camera
Mini wireless camera built in a microphone installed on the top of the tail
6 distance measurement infrared sensors (antenna-like sensors) located at the legs and the front part
Simulated AMOS-WD06 via the physical simulation (Yet Another Robot Simulator YARS provided by Frank Pasemann and Keyan Mahmoud Ghazi-Zahedi of Fraunhofer AIS) (the implemented controller is described in [2,3,4,5]).
Reactive behavior of the four and six-legged walking machines (AMOS-WD02 and -WD06) simulated on the physical simulator YARS. The left panel shows the simulated walking machine with its virtual environment. The right panel shows the reactive neurocontroller and the activation of each neuron. (35.0 MB) avi (Extension 1) (the implemented controller is described in [2,3,4,5]).
Physical walking machines (AMOS-WD02 and -WD06) and their reactive behaviors in different environmental situations. (21.0 MB) avi (Extension2) (the implemented controller is described in [2,3,4,5]) .
Omnidirectional walking behavior of the physical 6- and 8-legged walking machines in a real environment (the implemented controller is described in [1]) .
Self-protective reflex:This action will be triggered as soon as the machine is turned into an upside-down position. As a consequence, it stands still in thisposition as long as the stimulus (upside-down detector signal) is presented (the implemented controller is described in [1]).
Escape behavior: This action will be activated as soon as the rear IR sensor detects an object. As a consequence, the AMOS-WD06 increases its walking speed, as if it escapes from an attack. This action will be preserved for a few steps even if the activating stimulus has already been removed (the implemented controller is described in [1]).
Obstacle avoidance behavior: A behavior has been implemented on the AMOS-WD06 in order to enable it to avoid obstacles as well as to protect it from getting stuck in corners or deadlock situations during walking in an unknown environment (the implemented controller is described in [1]).
Three different situations showing different obstacle avoidance behaviors:
Situation1: the obstacles are placed beside the machine
Situation2: the obstacles are placed placed on the left front of the machine
Situation3: the obstacles are placed placed in front of the machine
AMOS runs an obstacle course: Different gaits, obstacle avoidance, phototaxis, and resting
Description: Autonomous walking behaviors in different environmental conditions. A complex sequence of eight different behaviors is shown that include standard walking in a tetrapod gait, upslope walking in a wave gait, rough-terrain walking in a wave gait, self-untrapping through chaotic motion, down-slope walking in a mixture or transition gait (from wave to tetrapod), active phototaxis by fast walking in a tripod gait, and resting. As soon as obstacles are detected the machine performs obstacle avoidance behavior by turning left/right.
Escaping from danger from behind, orienting and self-protection
Description: Sensor-driven behavioral patterns. In the first scenario, the walking machine tries to escape from the attack of a manually controlled robot by increasing its walking speed by means of changing its gait from a wave gait to a tripod gait. In the second scenario, the walking machine shows orienting responses by avoiding obstacles and performing phototaxis. Note that in this scenario it is set to walk with only one gait type (tripod gait) in order to see the orienting behavior more clearly. Furthermore, here we show that stopping the machine in front of a light source during phototaxis can be achieved by inhibiting only all TC-joints. As a result, it performs �marching� in front of the light source. In the last scenario, the walking machine performs a self-protective reflex by standing upside-down when it is turned into an abnormal walking position and it immediately returns to walk again as soon as it is turned back to its normal walking position.
Description: Foothold searching experiment with and without chaos. When applying chaos, the walking machine successfully performs self-untrapping if its foot gets stuck in a hole but without chaos it fails
Description: Learning to optimize energy consumption during walking on a steep slope. The walking machine learns to search for an energy saving gait (i.e., slow wave gait) while walking on a steep slope.
Description: Learning to escape danger from behind. The walking machine learns to search for a fast gait (i.e., tripod gait) in order to escape danger from behind. Here the low frequency sound and the reflex infra-red signal are thought to represent danger signals. They are detected by the auditory-wind detector sensor (AW) and the rear infra-red sensor (IR).
Learning to use optimal gaits to save energy (another experiment)
Description: Additional set of learning experiments of optimizing power during walking upwards a slope, where the initial order of gaits is different but the resulting gait the same (compare Video 19)
[1] Manoonpong, P.; Pasemann, F.; Woergoetter, F. (2008) Sensor-Driven Neural Control for Omnidirectional Locomotion and Versatile Reactive Behaviors of Walking Machines. Robotics and Autonomous Systems, doi:10.1016/j.robot.2007.07.004,Elsevier Science, Vol 56(3), pp 265-288.(pdf)
[2] Manoonpong, P. Neural Preprocessing and Control of Reactive Walking Machines: Towards Versatile Artificial Perception-Action Systems (Cognitive Technologies) (Hardcover), Springer-Verlag, (published 2007, in English)
[3] Manoonpong, P.; Pasemann, F.; Roth, H. (2007). Modular reactive neurocontrol for biologically-inspired walking machines. The International Journal of Robotics Research, vol. 26, no. 3, pp. 301-331, dio: 10.1177/0278364906076263(pdf) ("The final, definitive version of this paper has been published in IJRR, 3, March/2007 by Sage Publications Ltd, All rights reserved. � SAGE Publications Ltd, year of publication. It is available at: http://online.sagepub.com/ ") , http://ijr.sagepub.com/ (Multimedia files: Extension1, Extension2)
[4] Manoonpong, P.; Pasemann, F.; Roth, H. (2006). A modular neurocontroller for a sensor-driven reactive behavior of biologically inspired walking machines. International Scientific Journal of Computing, "Special Issue on ICNNAI-2006", vol. 5, no. 3., pp. 75-86 (pdf)
[5] Manoonpong, P.; Pasemann, F.; Roth, H. (2006). A modular neurocontroller for a sensor-driven reactive behavior of biologically inspired walking machines. In: Proceedings of the Fourth International Conference on Neural Networks and Artificial Intelligence (ICNNAI �2006), the Brest State Technical University Press (ISBN 985-493-036-X), 31 May - 2 June, Brest, Belarus, pp. 70�77. (pdf)
[6] Manoonpong, P.; Pasemann, F. (2005). Advanced mobility sensor driven-walking device 06 (AMOS-WD06). In: Proceedings of the Third International Symposium on Adaptive Motion in Animals and Machines, Robot data sheet, Ilmenau: ISLE, ISBN: 3-938843-03-9, p. R23. (pdf)
[7] Manoonpong P., Pasemann F., and Woergoetter F. (2007) Reactive Neural Control for Phototaxis and Obstacle Avoidance Behavior of Walking Machines. Proceedings of World Academy of Science, Engineering and Technology (PWASET), International conference on Intelligent systems (ICIS 07), Volume 26 with ISSN: 1307-6884, Bangkok, Thailand, December 14-16 (pdf)
[8] Manoonpong P., Roth H. (2008) Reactive neural control for autonomous robots: From simple wheeled robots to complex walking machines, In: Proceedings of the Fifth International Conference on Neural Networks and Artificial Intelligence (ICNNAI �2008), May 27-30, 2008, Minsk, Belarus.(pdf)
[9] Manoonpong P., Woergoetter F. (2008) Neural Control for Locomotion ofWalking Machines, Proceedings of 4th International Symposium on Adaptive Motion of Animals and Machines (AMAM2008), Case Western Reserve University, Cleveland OH-USA, June 1-6 2008, pp. 54-55. (pdf)
[10] Manoonpong P., Woergoetter F. (2008) Biologically-Inspired ReactiveWalking Machine AMOS-WD06, Proceedings of 4th International Symposium on Adaptive Motion of Animals and Machines (AMAM2008), Case Western Reserve University, Cleveland OH-USA, June 1-6 2008, pp. 240-241.(pdf)
[11] Manoonpong P., Woergoetter F., Pasemann, F. (2008) Neural Preprocessing of Auditory-Wind Sensory Signals and Modular Neural Control for Auditory- and Wind-Evoked Escape Responses of Walking Machines, Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 21- 26 February 2009, pp. 786-793. (Finalist of the Tzyh-Jong Tarn best paper award)(pdf)
[12] Steingrube, S.; Timme, M.; Woergoetter, F.; Manoonpong, P. (2010) Self-Organized Adaptation of Simple Neural Circuits Enables Complex Robot Behavior. Nature Physics 6, 224-230. doi:10.1038/nphys1508
[13] Manoonpong, P.; Woergoetter, F. (2009) Adaptive Sensor-Driven Neural Control for Learning in Walking Machines. 16th International Conference on Neural Information Processing Bangkok, Thailand, December 1-5 (ICONIP'09), Part II, LNCS 5864,pp. 47-55 (pdf)
The top image
of this page is created from several images including the corkroach image
modified from Abbott A. (2007), Nature, the neuron image modified from
http://livelightbeing.com/2011/06/17/neuron-art/





















{kind=link}